Resilient Market-Based Multi-Robot Exploration under Byzantine Threats
Independent Study, PennConducted interdisciplinary research bridging distributed systems and robotics to enhance security in multi-robot systems.
A list of my course, capstone, and research projects.
Conducted interdisciplinary research bridging distributed systems and robotics to enhance security in multi-robot systems.

Designed and built a 3-DOF robotic arm with a 2-DOF gripper for the Unitree Go1, integrating custom PID motor control and ROS for agile loco-manipulation.

Designed and built a small proof-of-concept robot to patrol a power transmission line and discourage birds from congregating on the wire.
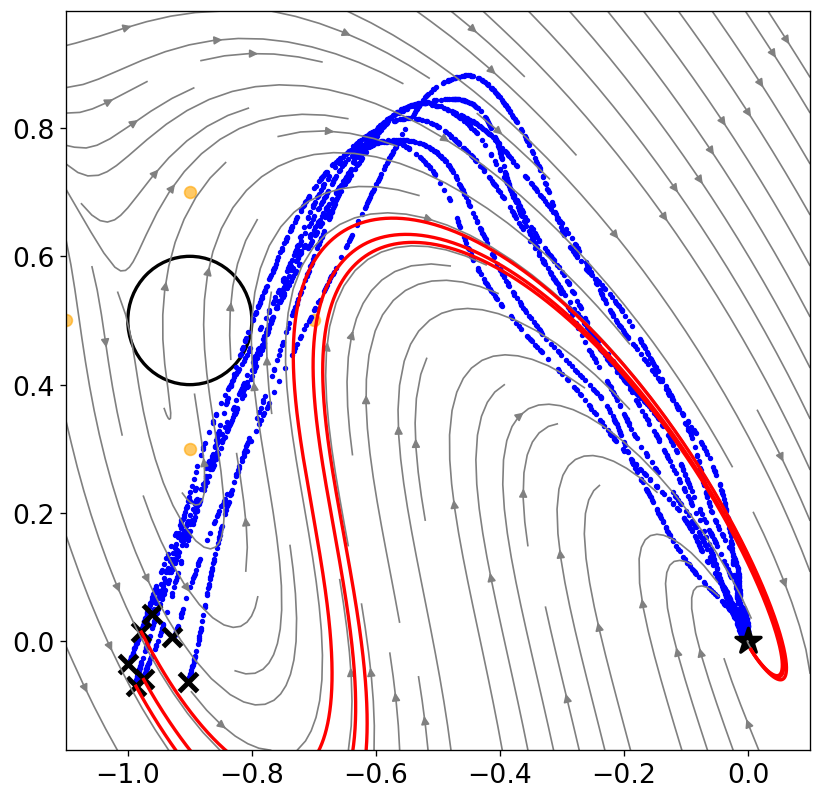
Developed a one-step framework for learning Lyapunov-stable, obstacle-aware polynomial dynamical systems from demonstrations for safe robot motion generation.
Proposed an online trust learning algorithm to identify malicious agents for cooperative, game-theoretic task allocation in drone swarms.

Developed a flocking-based robot system that tracks a moving target, maintains formation, and avoids obstacles collaboratively.

Tested and validated control and navigation algorithms on the Crazyflie 2.0, enabling precise, agile flight through maps and mazes using A*, trajectory optimization, and state estimation.
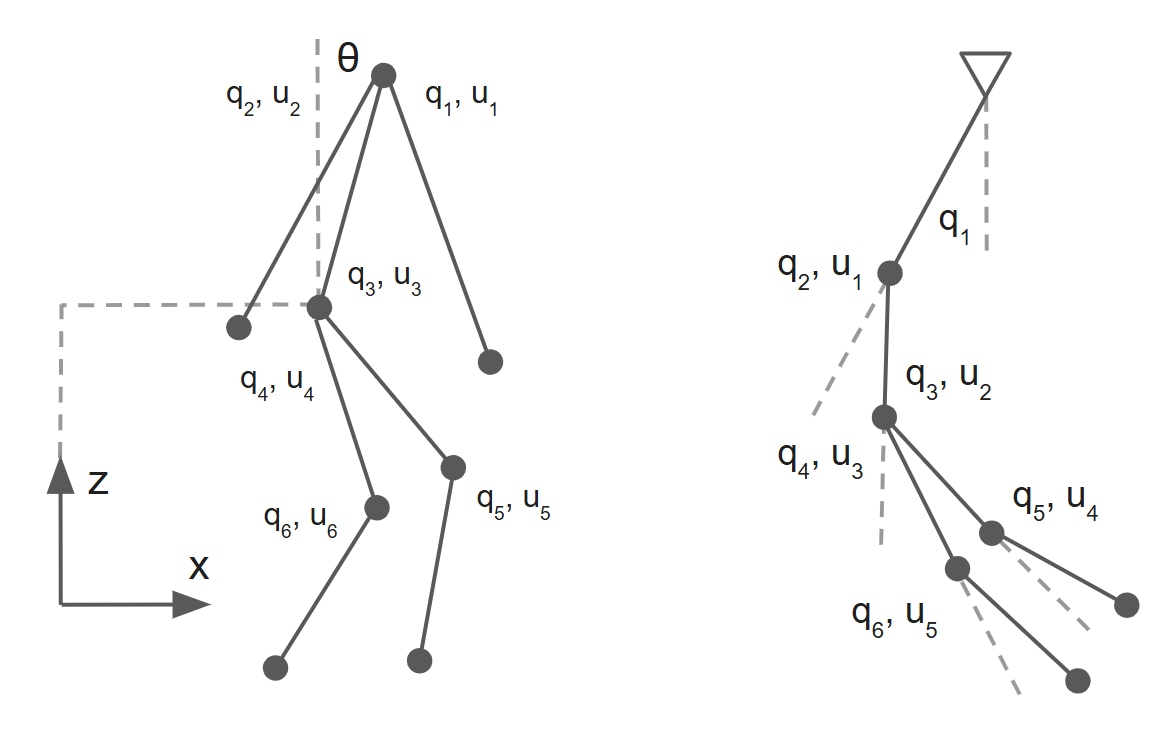
Designed and implemented an operational space controller in simulation for a planar humanoid robot to achieve stable walking and jumping.

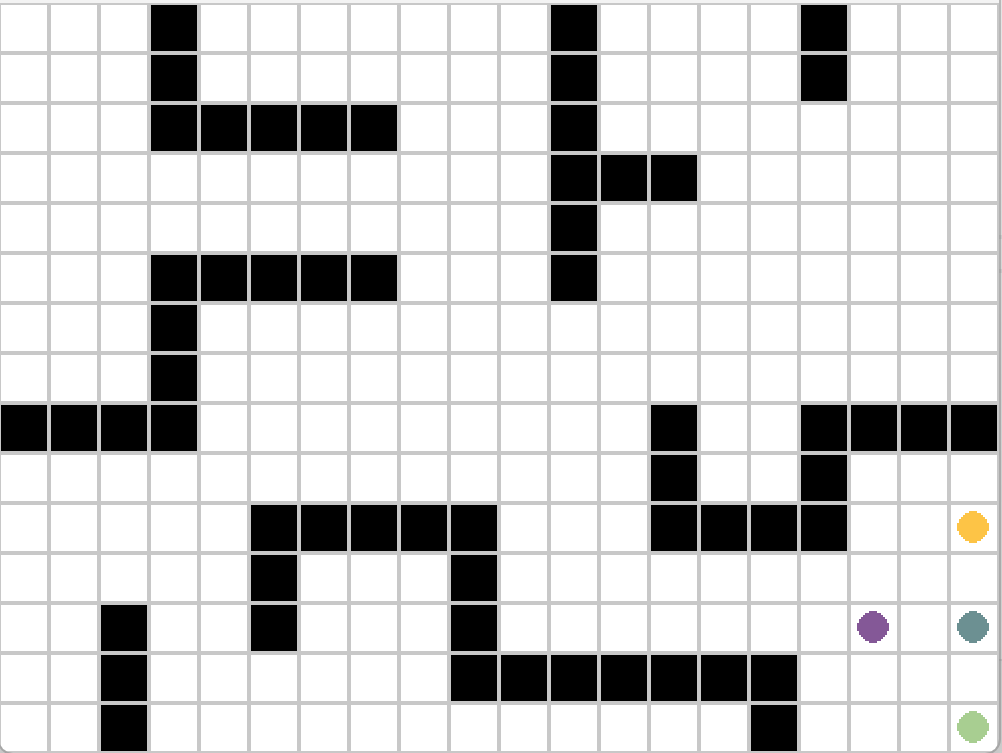
Programmed a Turtlebot 3 robot to navigate through an unknown maze using A* frontier exploration and generate a map for the maze using laser-based SLAM.

Developed an autonomous vision-based robotic pick and place system to sort balls of different colors using a 3 DoF spherical robot manipular.

Customized and programmed a set of robots to communicate with each other to escape from a maze that uses a variety of beacons and tags to lead the robot to find the escape door.

Built and programmed a set of mobile robots to work together to pick up solar panels and place them onto roofs of different angles on a competition field.